レギュレーション
レース概要
F1Tenthとは1/10スケールの自動運転レースで,ハードウェア構築からソフトウェア実装を通して自動運転技術を学ぶと共に新たな研究成果の創出を目指すものです.各チームはモータドライバ,LiDAR,制御PCなどを搭載した1/10スケールラジコンカーの設計と自己位置推定,経路追従,障害物回避といった自動運転技術の実装を行い,障害物や他車両に衝突せずに如何に速くコースを走破できるかを競います.
F1-Tenthの世界大会(オリジナルの大会)はこちら
F1Tenth-JAPANは,自動運転技術の学習と,研究・開発スキルの獲得による,日本の学生,社会人のレベルアップの機会として設立しました.
日本にはたくさんのロボティクス,制御分野の研究者,学生,技術者がおり,高度な技術を持っているにも関わらず,その技術を世界的にアピールする機会が極めて少ないと考えています.日本の技術を世界レベルに底上げし,世界と対等に戦い,競い合える環境の一つとして,貢献していきたいと思っています.
日本には認識,計画,制御に関する多くの学生,研究者,技術者がいますが,F1-Tenthをはじめとする国際コンペではなかなか日本チームを見ることができません.海外の学術ソサイエティ,企業,ファンドに認めてもらう機会を持つため,盛り上げていきたいと思っています.
※本F1-Tenth Japanは元大会の主催,Professor Rahul Mangharamから承認を受けています,F1Tenth-JPで練習し,研究した成果をもとにぜひ世界大会に出場して,日本勢の優勝を目指しましょう!
使用する車体
[ F1-tenth regulation ]
使用する車体はTraxxas Slash 4×4 Premiumシャーシに,下記にあるようなモータドライバ,センサ,制御PCなどを搭載したものとします.車体の改造方法や電装についてはこちらを参考にしてください.記載のないものを利用する場合はお問い合わせください.ただし屋内GPS等グローバルな位置を直接定位するセンサは使用禁止とします.
- モータドライバ
- センサ
- UTM-30LX 相当またはそれ以下のスペックの2D LIDAR (3D Lidarは禁止です)
- Intel RealSense 相当またはそれ以下のスペックのRGB(D)カメラ (自己位置推定機能を有するものは禁止です)
- カメラ (通常のRGB画像または白黒画像のみを取得する2Dカメラであれば性能は制限されません)
- 制御PC
- NVIDIA Jetson Series
- Intel NUC
- またはこれら相当以下のスペックの計算機(Raspberry Pi等)
また車体は以下の要件を満たす必要がありますのでご注意ください.
- 車載PCのみで制御されること.計算リソースを外部PCに持つことはNG.
- 駆動用DCモータのはシャーシ付属のVelineon 3500 kV 1つとし複数のモータを使うことはできません.
- DCモータ用バッテリーは3 cell LIPOバッテリー1つとします.
[ F1-tenth JAPAN 追加ルール]
加えて,F1Tenth-JAPANでは,日本大会であることから,日本製タミヤ社の下記のセットアップも使用可能とします.
世界大会F1TenthのTraxxas社セットアップに比べ,費用を抑えて車両構築が可能です.シャーシ,足回り以外の点についてはF1Tenthルール準拠です.
- 仕様シャーシ,モーター
- TAMIYA TT02 シャーシシリーズ(ワンメイク)
- TT-02
- TT02 Type S(RX)
- TT02 R(R)
- 等,ホイールベース・幅等が同等のTAMIYA純正シャーシ
- スピードコントローラー
- TBLE-04S (タミヤRCシステム ファインスペック 2.4Gに付属)
- TBLE-04SR (ブラシレス用T17.5以上)
- 上記のいずれか.改造品,TAMIYA社外品ははレギュレーション外.
- 駆動モーター
- TAMIYA純正ブラシモータ(TT02用)
- 540-N (タミヤRCシステム ファインスペック 2.4Gに標準で付属)
- その他 TT-02シャーシ用純正モータの一部 (純正モータ)
- ※ストックモーターシリーズは禁止
- ※改造品,社外品はレギュレーション外
- TAMIYA純正ブラシレスモータ(TT02用)でT17.5以上のもの
- TAMIYAブラシレスモータ T21.5 / T17.5
- ※T15.5,T10.5は純正でも禁止とします
- ※改造品,社外品はレギュレーション外
- TAMIYA純正ブラシモータ(TT02用)
- タイヤ
- TAMIYA純正タイヤ(TT02用純正タイヤ・ホイール)
- ※改造品,社外品はレギュレーション外
- その他,ステアサーボや各種伝達部品(シャフト,ベアリング等)は自由に改造いただけます.
- TAMIYA TT02 シャーシシリーズ(ワンメイク)
- 主駆動用電池
- TAMIYA 7.2V Ni-MH
- TAMIYA 6.6 LF
- または2Cell相当電圧の互換バッテリー.衝突がありますので,
LiPOバッテリは避けてください.
- センサ
- F1Tenthルールに準ずる
- 制御PC
- F1Tenthルールに準ずる
[ その他注意事項 ]
- タイヤ
- 床面保護のため,極端に柔らかいタイヤ,粘着性のあるタイヤ等,タイヤマークが残る可能性があるタイヤの使用を禁止します.
原則Traxxas,またはタミヤのオフィシャルタイヤをご利用ください.また,持続的なドリフト走行なども同様の理由で禁止します.
- 床面保護のため,極端に柔らかいタイヤ,粘着性のあるタイヤ等,タイヤマークが残る可能性があるタイヤの使用を禁止します.
- ハードウェア改造について
- 本コンペティションの趣旨は,ソフトウェアの優劣を競うことにあります.
ハードウェアの改造による速さの追求は本意ではありません.このコンペティションそのものの趣旨をご理解のうえ,参加ください.
- 本コンペティションの趣旨は,ソフトウェアの優劣を競うことにあります.
- 緊急停止
- Joystickからの入力により遠隔操作,緊急停止が可能であること.
- 安全対策
- 他車両が自車を検出できるよう,車体後部に以下を満足するボックスを搭載すること.
- 幅12cm以上,奥行き12cm以上
- ボックスの最上部が地上から20cm以上
- 衝突時の衝撃緩和のためバンパーを取り付けること.クッション性の素材をフロントに取り付けるなど簡単なもので十分です.
- 他車が衝突してもバッテリに直接激突しない構造を取ること.
- 他車両が自車を検出できるよう,車体後部に以下を満足するボックスを搭載すること.
ルール
ルールはこちらの元大会のルールに基づきます.以下の章を参照ください.
- GENERAL
- IN-PERSON (PHYSICAL) COMPETITION
- シャーシについては2.1.bのRestricted Classを参照してください.
コース
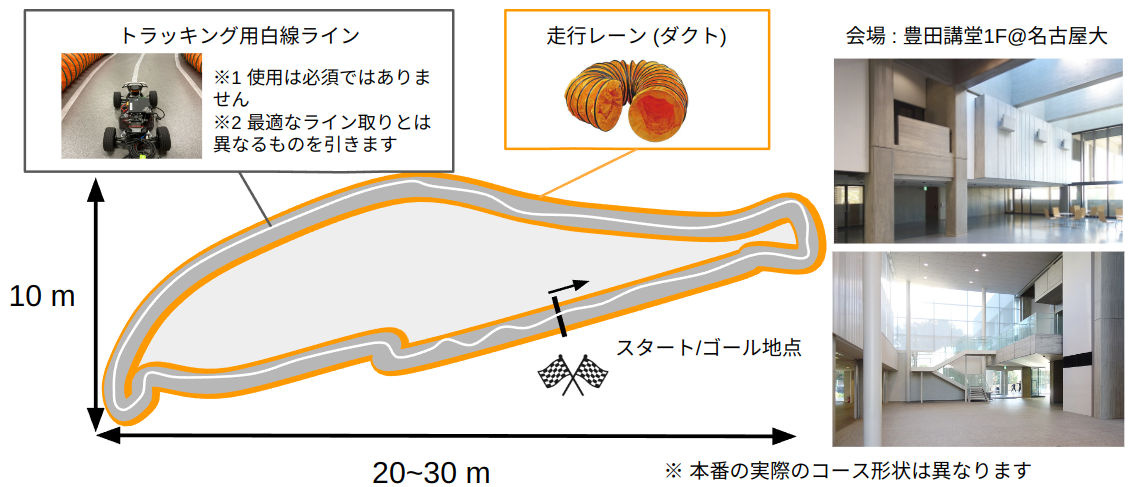
コースは30m x 10mのフラットな地面上にこちらのようなダクトを利用して作成され,最小コース幅は車体3つ分となります.ダクトの連結部にはLiDARの光が通り過ぎてしまう箇所があります.
予選トライアル
各チーム2回ずつ5分間の単独走行中の最速ラップタイムとコース壁への衝突無しで連続走破できたラップ数の2つを計測し,それぞれの順位に応じて決勝トーナメントの組み合わせが決まります.
- コースに衝突した場合,速やかに車両を停止させてください.その後車両を衝突地点付近に移動させてから再スタートしてください.
- ラップ数のカウントはチェックポイントで行います.コース壁に衝突後再スタートした場合,2回目のチェックポイント通過時点でラップ数1とカウントされます.
- 1回目と2回目の走行で車両のセッティングを変更できます.
- 走行中の車両のセッティング変更を行う場合は一度車両を停止して行うものとします.この場合,その後のラップ数は1からのカウントになります.
- 一度5分間の走行が始まると,衝突後の車両移動やセッティング変更の途中も時間は止まりませんのでご注意ください.
決勝トーナメント
コースの対角から同時にスタートし,どちらが先に10周できるかを競います.これをスタート地点を入れ替えながら3セット行い2勝したチームの勝利となります.
- レース開始前の10分間で各車両の機能チェックを行います.これらを時間内に通過できなかった場合はその時点で敗退となります.
- 障害物回避: コース上に配置した障害物を避ける,もしくは障害物の前で停止することができるか確認します.
- 緊急停止: ジョイスティックからの入力により,車両を停止できるかを確認します.
- コースや障害物への衝突にはペナルティがありません.衝突時の対応は予選トライアルと同様です.
- 他車両との衝突が起きた場合,一度レースを止めて両車体を衝突地点に戻してから再スタートとなります.